Classes >>Final Project Presentations
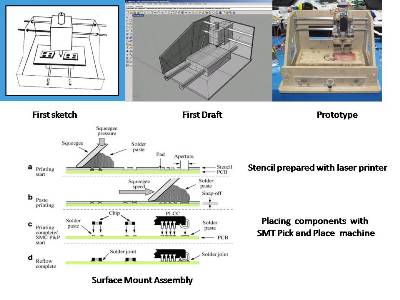
My originally project was to design the necesary components for improve the MTM snap machine and give them aditional features as to pick and place electronical components or soldering with a hot air cannon. By now I wanted to show the complete design of the machine (redesign) the adapting from the already exiting MTM machine. In this presentation in advance I show a collage of pictures where you can see the redesigning of pressfits, the design and manufacture of the shell. The design of the head and the cam mechanism to create the suction of the component and the support for the hypodermic syringe plunger as aditional element. The redesigned components were made in Rhino program. I am showing aswell the assembling of the machine with the conection to use the arduino and the bridge board for their automation . This project was developed toghether with Roberto Delgado.
The prototipe presented was made on MDF material and this carried some problems of stiffness and resistance as we needed to make the assembling and disassembling several times.
Finaly it presented a video where the machine plays all he needed movements to fulfill its role.
We will follow working in this project to get the complete target we proposed us since the starting FabLab Academy program.
Thanks to all Fabers in the world and the instructors. Really I am not the same after this program.
  |
 |
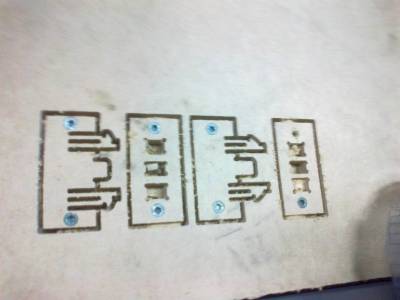   |
The pressfit prototipe. Testing and redesigning
|
 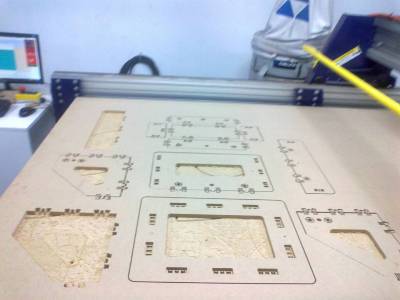 |
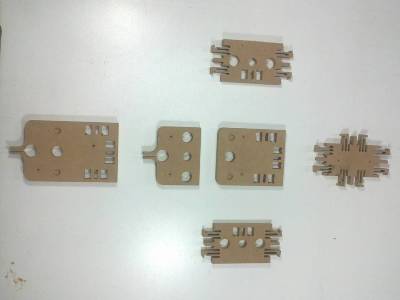
Using the ShopBot to milling the case, the table and the head of the machine. |
  |
Assembling the case and the table. |
  |
Assembling the head using mechanical components. |
  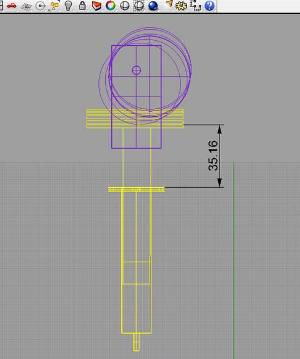 |
Designing the head to get the best component that holds the servo motor. |
  |
Manufacturing the component designed before and assembling the servo motor. |
  |
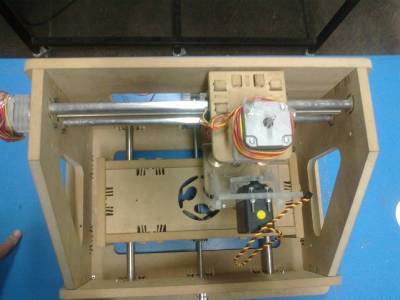
The head completely assembled. |
  |
Front and top views of the assembly of the machine |
  |
The pick and place machine ready to automation. |
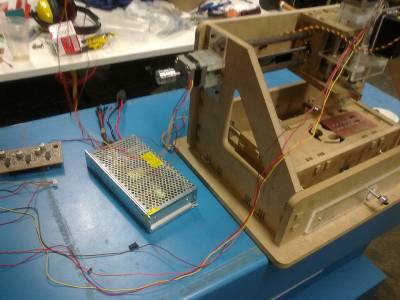 |
Connecting the machine to the electronic boards for automation. The video shows how the machine can execute the movements for its operation. We had some problems with the replacement of components, as these are imported. Roberto have worked in the programming using Arduino to get the final movements of the head in the machine that he is showing in his page. Our final project then come here. Finally, I add it was very beneficial for me to continue this training program Fab Academy and learned everything I know to spread our future TECSUP FabLab to be implemented in Lima.
Thanks to all Fabers in the world.